
Introduction
In the era of ubiquitous sensing and data-driven decision making, sensors form the critical foundation of countless applications ranging from autonomous vehicles and industrial automation to healthcare monitoring and environmental surveillance. However, the reality of sensor deployment often diverges significantly from the controlled laboratory conditions under which these devices are calibrated and tested. Real-world sensor data is invariably contaminated by noise and subject to drift, creating substantial challenges for accurate data labeling and subsequent machine learning applications.
Sensor noise and drift represent two of the most pervasive and problematic characteristics of real-world sensing systems. Noise manifests as random fluctuations in sensor readings that obscure the true signal of interest, while drift refers to the gradual, systematic change in sensor behavior over time, often due to aging, environmental factors, or component degradation. These phenomena become particularly problematic when attempting to create labeled datasets for supervised learning, where the quality and accuracy of labels directly impact model performance.
The challenge of labeling data in the presence of sensor imperfections extends beyond simple data quality issues. It touches on fundamental questions about ground truth establishment, uncertainty quantification, and the development of robust learning algorithms that can operate effectively despite imperfect input data. As sensing systems become increasingly deployed in critical applications where reliability and accuracy are paramount, understanding and addressing these challenges becomes not just academically interesting but practically essential.
Understanding Sensor Noise
Sensor noise encompasses various types of unwanted variations in sensor output that mask or distort the true signal being measured. These variations can be broadly categorized into several types, each with distinct characteristics and implications for data labeling.
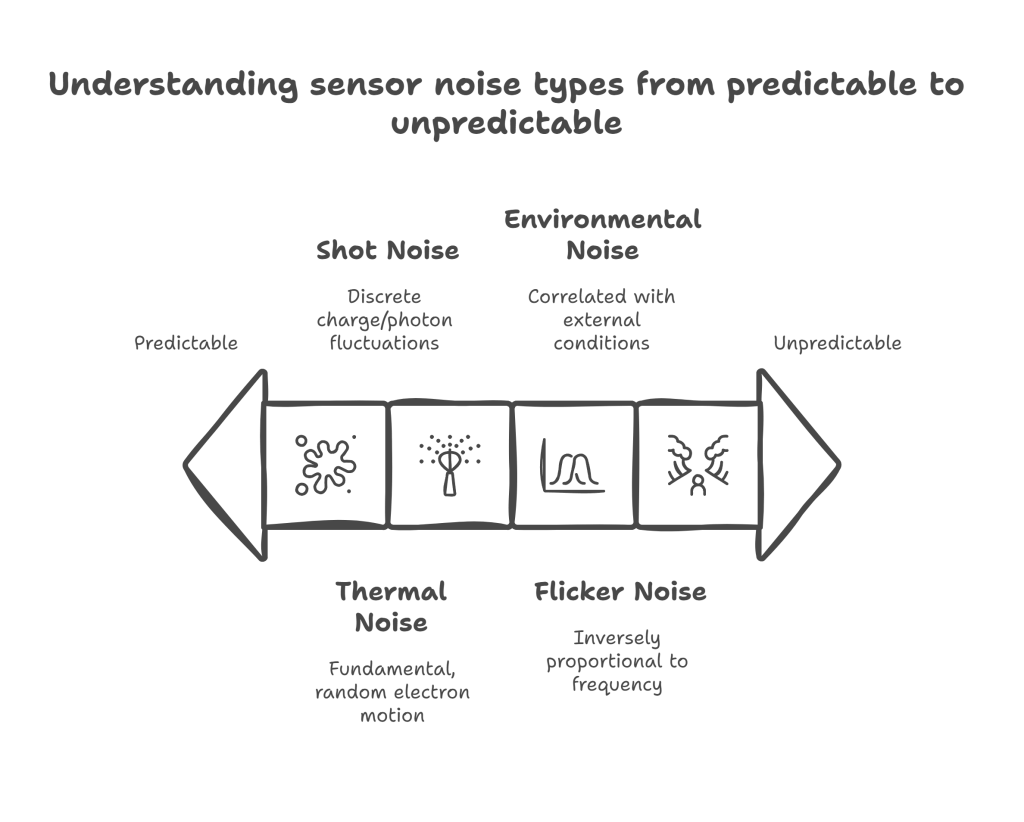
Thermal Noise, also known as Johnson noise, represents the fundamental lower bound of noise in electronic systems. It arises from the random thermal motion of charge carriers in conductors and is present in all electronic devices. This type of noise follows a Gaussian distribution and is characterized by its white noise spectrum, meaning it has equal power across all frequencies. While thermal noise is generally low in amplitude, it can become significant in high-precision applications or when amplifying weak signals.
Shot Noise occurs due to the discrete nature of electrical charge and photons. In electronic sensors, it manifests as random fluctuations in current flow, while in optical sensors, it results from the quantum nature of light detection. Shot noise follows a Poisson distribution and increases with the square root of the measured signal, making it particularly problematic for low-light or low-current measurements.
Flicker Noise, commonly referred to as 1/f noise, exhibits a power spectral density that is inversely proportional to frequency. This type of noise is particularly troublesome at low frequencies and is often dominant in precision DC measurements. Its exact physical origin varies depending on the sensor type but is generally attributed to defects and impurities in materials or interfaces.
Environmental Noise encompasses all external factors that can influence sensor readings. This includes electromagnetic interference from nearby electronic devices, mechanical vibrations, temperature fluctuations, humidity changes, and other environmental variables that can affect sensor performance. Unlike the previously mentioned noise types, environmental noise is often correlated with external conditions and may exhibit patterns that can potentially be modeled or compensated for.
The presence of these various noise sources creates significant challenges for data labeling. Traditional labeling approaches often assume that sensor readings accurately reflect the true state of the measured phenomenon. However, in noisy conditions, distinguishing between genuine signal variations and noise-induced fluctuations becomes increasingly difficult. This uncertainty propagates through the labeling process, potentially leading to inconsistent or incorrect labels that can severely impact the performance of machine learning models trained on the resulting dataset.
The Nature of Sensor Drift
While noise represents random variations in sensor behavior, drift manifests as systematic changes in sensor characteristics over time. Drift can be particularly insidious because it often occurs gradually and may not be immediately apparent, yet it can significantly impact the validity of sensor measurements and, consequently, the accuracy of data labels.
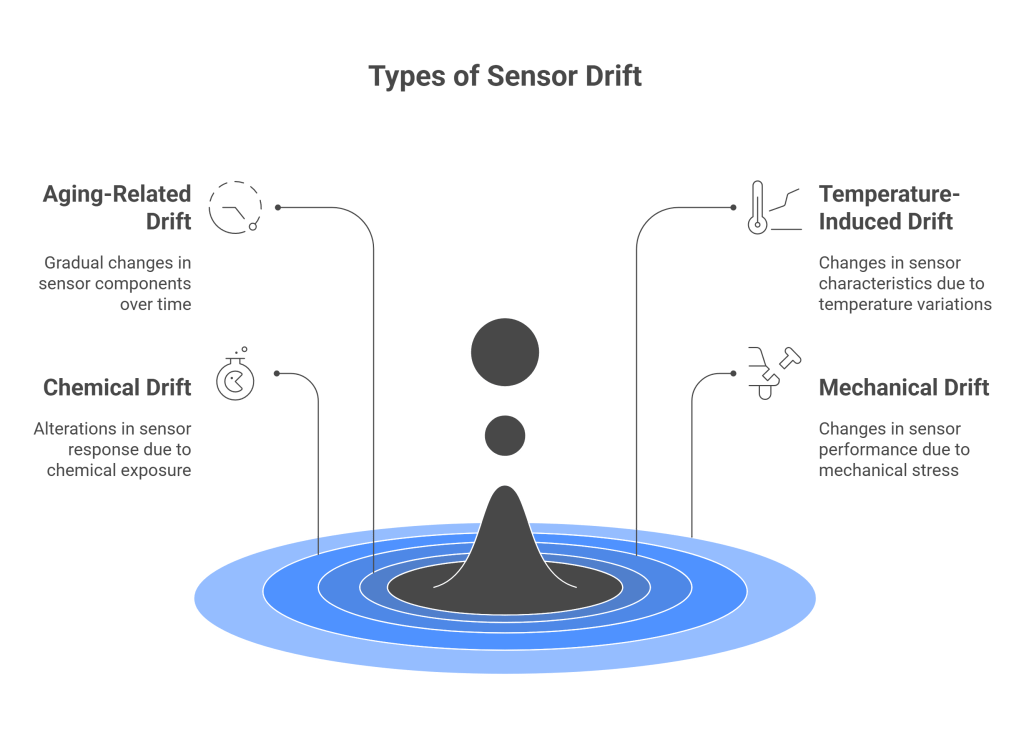
Aging-Related Drift is perhaps the most common form of sensor drift. As sensors age, their internal components undergo gradual changes that can affect their sensitivity, offset, and overall response characteristics. In semiconductor-based sensors, aging may involve changes in junction properties, while in mechanical sensors, it might involve material fatigue or wear. The rate of aging-related drift varies considerably depending on the sensor technology, operating conditions, and manufacturing quality.
Temperature-Induced Drift occurs when sensor characteristics change with temperature variations. While many sensors include temperature compensation mechanisms, these are often imperfect, particularly over extended temperature ranges or when temperature changes rapidly. Temperature drift can affect both the sensitivity and offset of sensors, leading to systematic errors that change with environmental conditions.
Chemical Drift is particularly relevant for sensors that interact with their environment, such as gas sensors, pH sensors, or biosensors. Exposure to certain chemicals can cause gradual changes in sensor materials, affecting their response characteristics. This type of drift is often irreversible and can be accelerated by exposure to harsh chemicals or extreme conditions.
Mechanical Drift affects sensors with moving parts or those subject to mechanical stress. Over time, mechanical components may wear, settle, or deform, leading to changes in sensor response. This type of drift is common in pressure sensors, accelerometers, and other mechanically-based sensing devices.
The impact of drift on data labeling extends beyond simple measurement errors. As sensor characteristics change over time, the relationship between sensor output and the true measured quantity evolves, potentially invalidating previously established calibration relationships. This temporal aspect of drift makes it particularly challenging to address in long-term data collection efforts or when attempting to maintain consistent labeling criteria across extended periods.
Challenges in Data Labeling
The presence of noise and drift in sensor data creates multifaceted challenges for the data labeling process. These challenges span technical, methodological, and practical domains, each requiring careful consideration and specialized approaches to address effectively.
Ground Truth Establishment becomes significantly more complex when dealing with imperfect sensor data. Traditional approaches to establishing ground truth often rely on the assumption that sensor measurements accurately reflect the true state of the measured phenomenon. However, in the presence of noise and drift, this assumption breaks down, necessitating alternative approaches to ground truth establishment.
One approach involves the use of reference sensors or measurement systems that are known to be more accurate or stable than the primary sensors being used for data collection. However, this approach is not always feasible, as reference systems may be expensive, impractical for field deployment, or may not exist for certain types of measurements. Additionally, reference systems are themselves subject to their own sources of error and uncertainty.
Temporal Consistency represents another significant challenge in labeling noisy and drifting sensor data. As sensor characteristics change over time due to drift, the mapping between sensor output and appropriate labels may also change. This temporal variation can lead to inconsistencies in labeling, where identical sensor readings at different times may warrant different labels, or where different sensor readings at different times may warrant identical labels.
Addressing temporal consistency requires sophisticated approaches that can account for the time-varying nature of sensor characteristics. This might involve regular recalibration of sensors, the use of temporal models that can predict and compensate for drift, or the development of labeling schemes that explicitly account for temporal uncertainty.
Multi-Sensor Fusion adds another layer of complexity to the labeling challenge. Many modern sensing systems employ multiple sensors to provide redundant measurements or to capture different aspects of the phenomenon being monitored. In such systems, the noise and drift characteristics of individual sensors may differ, creating challenges in determining how to combine information from multiple imperfect sources to generate appropriate labels.
Effective multi-sensor fusion in the presence of noise and drift requires sophisticated algorithms that can weigh the contributions of different sensors based on their current reliability and accuracy. This might involve real-time assessment of sensor performance, adaptive weighting schemes, or the use of machine learning techniques to learn optimal fusion strategies from historical data.
Uncertainty Quantification becomes crucial when dealing with imperfect sensor data. Rather than providing discrete labels, it may be more appropriate to provide probabilistic labels that explicitly account for the uncertainty introduced by sensor noise and drift. This approach requires the development of methods to estimate and propagate uncertainty through the labeling process, which can be mathematically complex and computationally demanding.
Impact on Machine Learning Models
The quality of labeled data directly impacts the performance of machine learning models, making the challenges associated with labeling noisy and drifting sensor data particularly significant for subsequent learning tasks. Understanding these impacts is crucial for developing effective strategies to mitigate their effects.
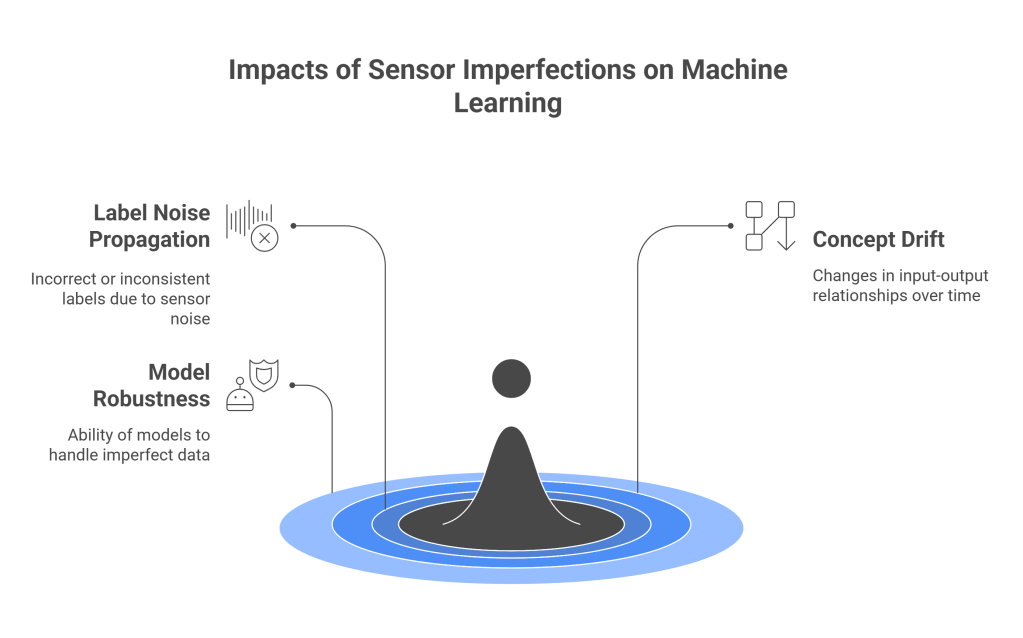
Label Noise Propagation represents one of the most direct impacts of sensor imperfections on machine learning performance. When sensors produce noisy readings, the resulting labels may be incorrect or inconsistent, leading to what is known as label noise. Label noise is particularly problematic for supervised learning algorithms, as it can cause models to learn incorrect associations between inputs and outputs.
The impact of label noise varies depending on the type of learning algorithm being used. Some algorithms, such as support vector machines with appropriate regularization, may be relatively robust to moderate levels of label noise. However, others, particularly those that rely on memorization or exact fitting of training data, may be severely impacted by even small amounts of label noise.
Concept Drift in machine learning refers to the phenomenon where the relationship between inputs and outputs changes over time. When sensors drift, they can induce a form of concept drift in the labeled dataset, where the same input features may correspond to different labels at different times, or where different input features may correspond to the same label at different times.
This sensor-induced concept drift can be particularly challenging to address because it may not be immediately apparent and may occur gradually over time. Traditional approaches to handling concept drift often assume that the drift is observable in the performance of the learning algorithm. However, when drift is induced by sensor characteristics rather than changes in the underlying phenomenon being modeled, it may be more difficult to detect and address.
Model Robustness becomes a critical consideration when training on data labeled under imperfect conditions. Models trained on clean, accurately labeled data may fail to generalize well to real-world conditions where sensor noise and drift are present. Conversely, models trained on noisy, imperfectly labeled data may learn to be robust to these imperfections but may also have reduced accuracy on clean data.
Developing models that are robust to sensor imperfections while maintaining high accuracy requires careful consideration of the training process. This might involve techniques such as data augmentation to simulate various types of sensor noise and drift, robust loss functions that are less sensitive to label noise, or regularization techniques that prevent overfitting to noisy labels.
Mitigation Strategies
Despite the challenges posed by sensor noise and drift, various strategies can be employed to mitigate their impact on data labeling and subsequent machine learning applications. These strategies span hardware, software, and algorithmic approaches, often requiring a combination of techniques to achieve optimal results.
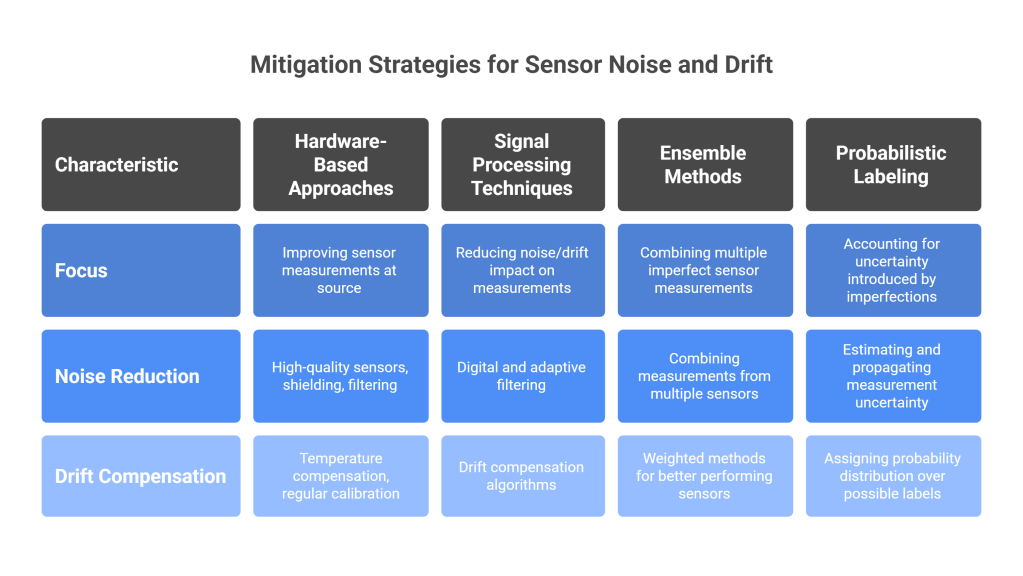
Hardware-Based Approaches focus on improving the quality of sensor measurements at the source. This includes the use of high-quality sensors with low noise characteristics, implementation of proper shielding and filtering to reduce environmental interference, and the deployment of redundant sensors to provide multiple measurements of the same phenomenon.
Temperature compensation represents a critical hardware-based strategy for addressing drift. By monitoring the temperature of sensors and applying appropriate corrections, it is possible to significantly reduce temperature-induced drift. Similarly, regular calibration using reference standards can help compensate for aging-related drift, though this approach requires careful scheduling and may not be practical for all applications.
Signal Processing Techniques offer powerful tools for reducing the impact of noise and drift on sensor measurements. Digital filtering can effectively remove high-frequency noise while preserving the signal of interest. Adaptive filtering techniques can adjust their characteristics based on the current noise conditions, providing more effective noise reduction in changing environments.
Drift compensation algorithms can attempt to model and correct for systematic changes in sensor behavior over time. These algorithms may use statistical models to predict drift based on historical data, or they may employ machine learning techniques to learn complex drift patterns from data. The effectiveness of these approaches depends on the predictability of the drift pattern and the availability of sufficient historical data.
Ensemble Methods leverage the principle that combining multiple imperfect measurements can often produce a more accurate result than any individual measurement. In the context of sensor data, this might involve combining measurements from multiple sensors measuring the same phenomenon, or it might involve combining measurements from the same sensor taken at different times.
Weighted ensemble methods can provide improved performance by giving more weight to measurements from sensors that are currently performing better. This requires real-time assessment of sensor performance, which can be challenging but is often feasible using statistical measures or comparison with reference measurements.
Probabilistic Labeling represents a fundamental shift from traditional discrete labeling approaches. Instead of assigning a single label to each data point, probabilistic labeling assigns a probability distribution over possible labels, explicitly accounting for the uncertainty introduced by sensor imperfections.
This approach requires the development of methods to estimate the uncertainty associated with each measurement and to propagate this uncertainty through the labeling process. While mathematically more complex than discrete labeling, probabilistic labeling provides a more honest representation of the information content in noisy and drifting sensor data.
Advanced Techniques and Methodologies
As the field of sensor data analysis has matured, several advanced techniques have emerged that specifically address the challenges of noise and drift in sensor measurements. These techniques often combine multiple approaches and leverage sophisticated mathematical and computational tools to achieve superior performance.
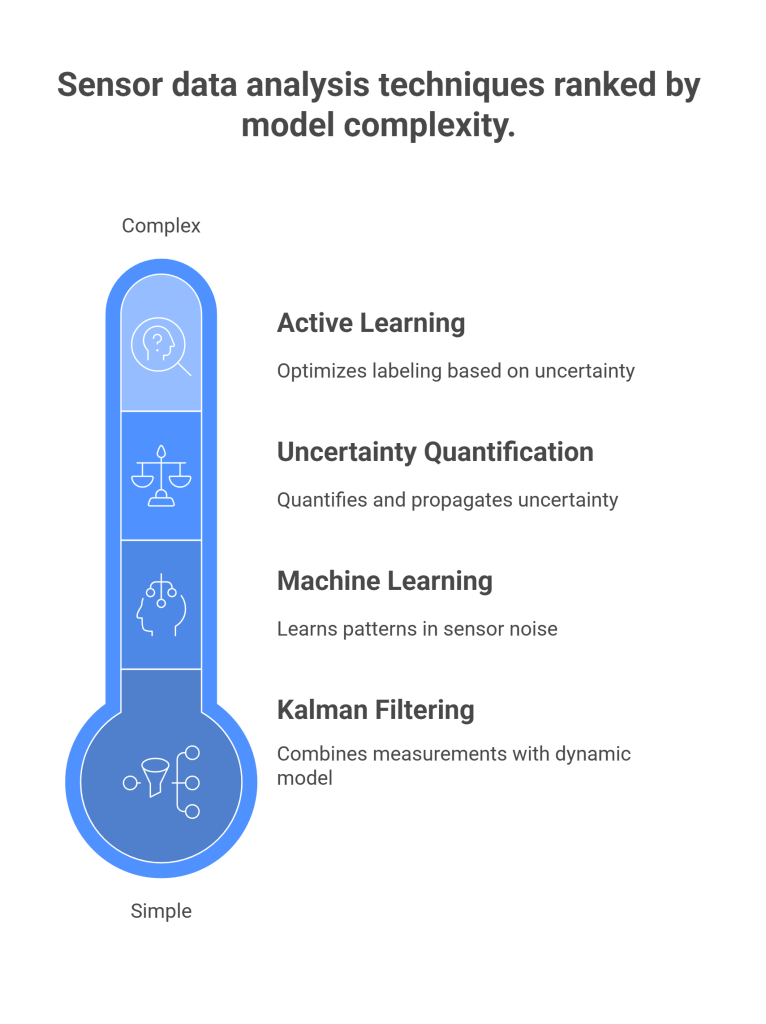
Kalman Filtering and its variants represent a powerful class of techniques for dealing with noisy sensor measurements. The Kalman filter provides an optimal way to combine noisy measurements with predictions from a dynamic model, effectively reducing the impact of noise while tracking the true state of the system being monitored.
Extended Kalman filters and unscented Kalman filters can handle nonlinear systems, while ensemble Kalman filters can deal with highly nonlinear or non-Gaussian systems. These techniques are particularly effective when combined with models that can predict the evolution of the measured phenomenon over time.
Machine Learning-Based Denoising techniques leverage the power of deep learning to learn complex patterns in sensor noise and develop sophisticated denoising strategies. Autoencoders can be trained to reconstruct clean signals from noisy inputs, while generative adversarial networks can learn to generate realistic clean signals that are consistent with noisy measurements.
Recurrent neural networks are particularly well-suited to handling temporal aspects of sensor data, including drift compensation. Long short-term memory networks can learn to model complex temporal dependencies in sensor behavior, potentially enabling more effective prediction and compensation of drift.
Uncertainty Quantification has emerged as a critical area of research for sensor data analysis. Bayesian approaches provide a principled framework for quantifying and propagating uncertainty through the data processing pipeline. Gaussian processes offer a flexible approach to modeling sensor behavior and associated uncertainty, while Monte Carlo methods can be used to sample from complex posterior distributions.
Conformal prediction represents a relatively new approach that can provide distribution-free uncertainty estimates for machine learning models. This technique can be particularly valuable when dealing with sensor data, as it can provide uncertainty estimates without requiring strong assumptions about the underlying data distribution.
Active Learning strategies can be employed to optimize the labeling process in the presence of sensor imperfections. By intelligently selecting which data points to label based on their information content and uncertainty, active learning can reduce the overall labeling effort while maintaining or improving the quality of the labeled dataset.
Uncertainty-based active learning strategies are particularly relevant for sensor data, as they can focus labeling efforts on data points where sensor imperfections create the greatest uncertainty. This approach can be particularly effective when combined with human-in-the-loop systems that can provide expert judgment on difficult cases.
Real-World Applications and Case Studies
The challenges of sensor noise and drift are not merely theoretical concerns but have significant practical implications across a wide range of applications. Understanding how these challenges manifest in real-world scenarios provides valuable insights into the importance of addressing them effectively.
Environmental Monitoring represents one of the most challenging domains for sensor deployment. Environmental sensors are often deployed in harsh conditions for extended periods, making them particularly susceptible to both noise and drift. Weather stations, air quality monitors, and water quality sensors all face these challenges.
In air quality monitoring, sensor drift can lead to gradual changes in the relationship between sensor readings and actual pollutant concentrations. This drift can be particularly problematic when sensors are used to trigger alerts or inform policy decisions. Noise in environmental sensors can also create false alarms or mask genuine environmental events, leading to inappropriate responses or missed opportunities for intervention.
Industrial Process Control relies heavily on sensor data for monitoring and controlling complex manufacturing processes. In these applications, sensor noise and drift can lead to suboptimal process control, reduced product quality, and increased waste. The stakes are particularly high in industries such as pharmaceuticals or food processing, where product quality and safety are critical.
Predictive maintenance applications in industrial settings face particular challenges from sensor drift. As equipment ages and operating conditions change, the relationship between sensor readings and equipment health may evolve. Maintenance models that do not account for this evolution may become less effective over time, potentially leading to unexpected failures or unnecessary maintenance actions.
Healthcare Monitoring presents unique challenges for sensor data analysis due to the critical nature of healthcare decisions and the high variability in patient physiology. Wearable health monitors, continuous glucose monitors, and other medical sensors must operate reliably across diverse patient populations and changing physiological conditions.
Drift in medical sensors can be particularly problematic because it may not be immediately apparent to patients or healthcare providers. Gradual changes in sensor calibration could lead to incorrect dosing decisions or missed medical events. The development of robust calibration and validation procedures for medical sensors is therefore critical for patient safety.
Autonomous Vehicles represent perhaps one of the most demanding applications for sensor reliability. Autonomous vehicles rely on multiple sensor types, including cameras, lidar, radar, and GPS, each with their own noise and drift characteristics. The safety-critical nature of autonomous driving applications means that sensor failures or inaccuracies can have catastrophic consequences.
Sensor fusion in autonomous vehicles must account for the varying reliability of different sensor types under different conditions. For example, camera sensors may be affected by lighting conditions, while lidar sensors may be affected by weather conditions. Developing robust fusion algorithms that can maintain performance despite these varying conditions is a critical challenge for autonomous vehicle development.
Future Directions and Emerging Trends
The field of sensor data analysis continues to evolve rapidly, driven by advances in hardware technology, computational capabilities, and algorithmic sophistication. Several emerging trends are likely to shape the future of how we address sensor noise and drift in data labeling applications.
Edge Computing is enabling more sophisticated signal processing and analysis to be performed directly on sensor nodes, rather than requiring transmission to centralized processing systems. This trend enables more responsive adaptation to changing sensor conditions and can reduce the impact of communication delays and failures on data quality.
Edge-based processing can enable real-time drift compensation and noise reduction, potentially improving the quality of labeled data. However, it also introduces new challenges related to the computational constraints of edge devices and the need for distributed coordination of processing algorithms.
Artificial Intelligence of Things (AIoT) represents the convergence of artificial intelligence and Internet of Things technologies. This trend is enabling the development of smart sensors that can adapt their behavior based on learned patterns and changing conditions. AI-enabled sensors may be able to perform self-calibration, detect and compensate for drift, and even predict their own failure modes.
The integration of AI directly into sensor systems opens up new possibilities for addressing noise and drift at the sensor level, rather than requiring post-processing approaches. This could lead to more robust and reliable sensor systems that can maintain their performance over extended periods with minimal human intervention.
Quantum Sensing technologies are emerging that promise to provide unprecedented sensitivity and stability for certain types of measurements. Quantum sensors leverage quantum mechanical phenomena to achieve measurement capabilities that are fundamentally limited by quantum noise rather than classical noise sources.
While quantum sensing technologies are still in early stages of development, they hold promise for applications requiring extreme precision and stability. However, these technologies also introduce new challenges related to quantum decoherence and the need for specialized operating conditions.
Federated Learning approaches are being developed that can enable collaborative training of machine learning models across multiple sensor networks without requiring centralized data collection. This approach can be particularly valuable for applications where sensor data cannot be easily shared due to privacy or security concerns.
Federated learning for sensor data analysis must address the additional challenges posed by heterogeneous sensor characteristics and varying data quality across different deployments. Developing robust federated learning algorithms that can handle these variations while maintaining model performance is an active area of research.
Conclusion
The challenges posed by sensor noise and drift in data labeling represent fundamental issues that must be addressed as sensing systems become increasingly ubiquitous and critical to modern applications. These challenges span technical, methodological, and practical domains, requiring sophisticated approaches that combine insights from signal processing, machine learning, and domain-specific knowledge.
The impact of these challenges extends far beyond academic interest, affecting real-world applications ranging from environmental monitoring and industrial control to healthcare and autonomous systems. As these applications become more critical and widespread, the importance of developing effective strategies to address sensor imperfections becomes increasingly paramount.
The mitigation strategies discussed in this article, from hardware-based approaches to advanced machine learning techniques, provide a comprehensive toolkit for addressing these challenges. However, the most effective approaches often require careful combination of multiple techniques, tailored to the specific characteristics of the sensors and applications involved.
Looking forward, emerging trends in edge computing, artificial intelligence, and quantum sensing promise to provide new tools and capabilities for addressing sensor noise and drift. However, these trends also introduce new challenges and complexities that must be carefully considered and addressed.
The field of sensor data analysis will continue to evolve as new technologies emerge and applications become more demanding. Success in this field will require continued collaboration between researchers, practitioners, and domain experts to develop solutions that can address the complex challenges of real-world sensor deployment while maintaining the reliability and accuracy required for critical applications.
Ultimately, the goal is not to eliminate sensor noise and drift entirely, which may be impossible in many practical applications, but rather to develop systems and methodologies that can operate effectively despite these imperfections. This requires a shift from assuming perfect sensor data to embracing uncertainty and developing robust approaches that can maintain performance in the face of imperfect information.
The journey toward more robust and reliable sensor systems will require continued innovation across multiple disciplines, from materials science and electronics to computer science and mathematics. By addressing these challenges systematically and comprehensively, we can build sensing systems that can fulfill their critical role in our increasingly connected and automated world.
Discover more from SkillWisor
Subscribe to get the latest posts sent to your email.
